How it works
To learn more about 'Virtual Reality Modeling Language' see 'general informations'.
To learn more about 'Virtual Reality Modeling Language' see 'general informations'.
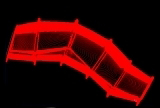
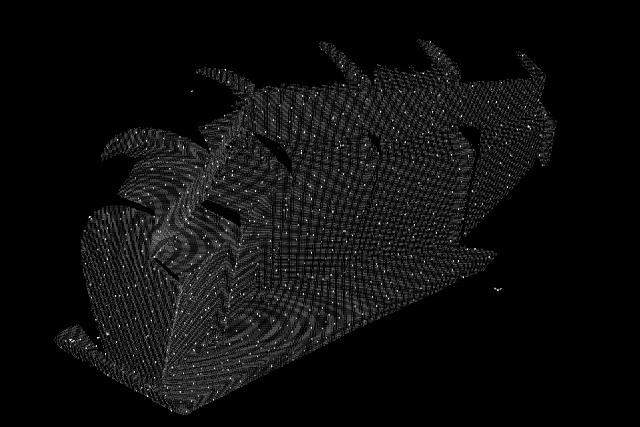
-) Im ersten Schritt wird das Modells mit Hilfe eines 3D-Laserscanner aufgenommen. Ein Datensatz besteht aus 6 Punktwolken die durch die Verwendung des Drehtellers (Aufnahmen alle 60 Grad) bereits registriert sind. Ein zweiter Datensatz besteht aus einer Dachaufnahme, die Punkte enthalten, die von den vorhergehenden Punktwolken nicht erfasst werden konnte.
-) Die beiden so erhaltenen Punktwolken werden in weiterer Folge mit dem Programm "Geomagic Studio" bearbeitet.


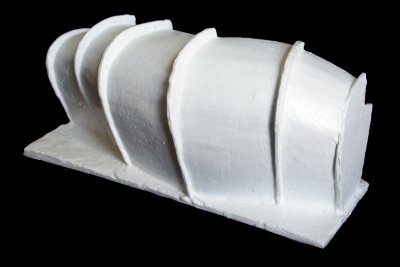
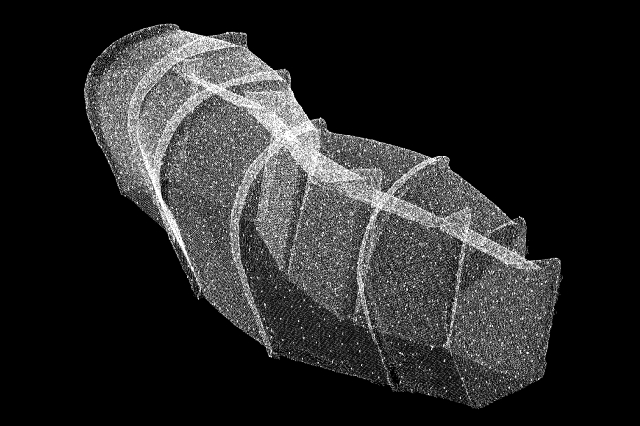
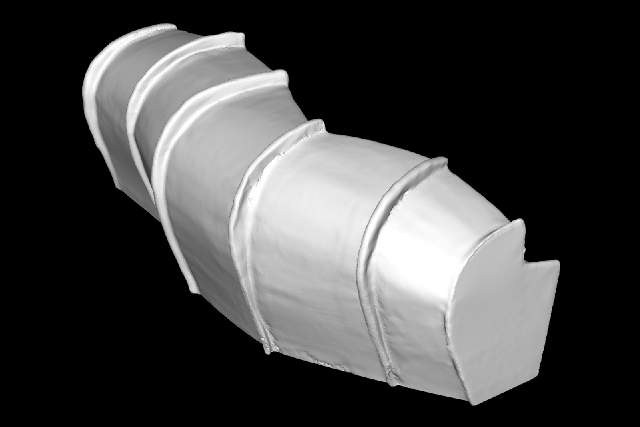
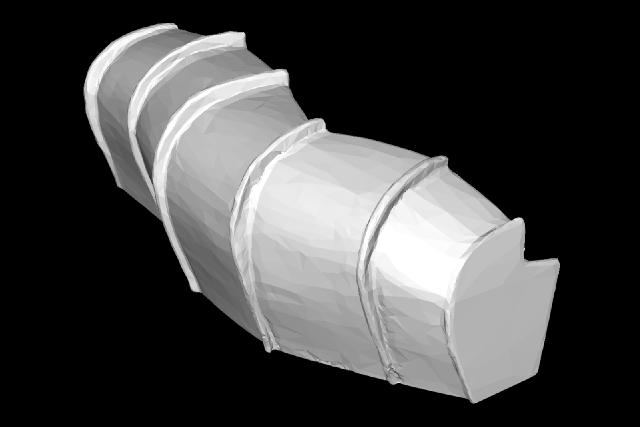
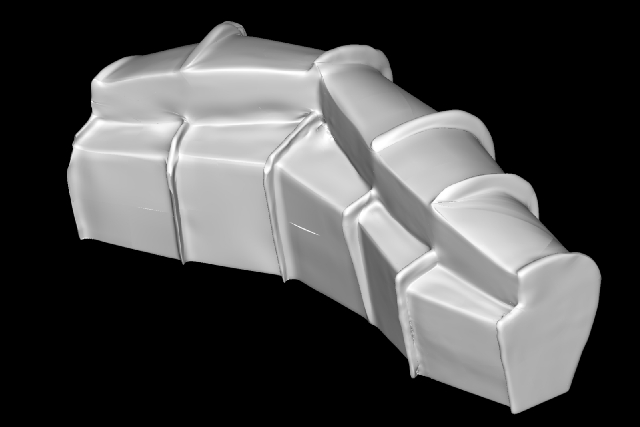
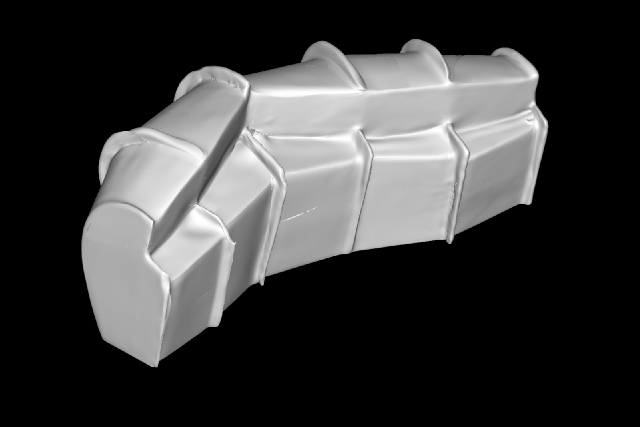
-) Die Punktwolken werden nun von Fehlern, d.h. Punkten die nicht zum eigentlichen Objekt gehören und aus dem 3D-Scan resultieren bzw. bereits in der Vorlage, dem Modell enthalten sind, gereinigt.
Beispiel für eine gereinigte Punktwolke:
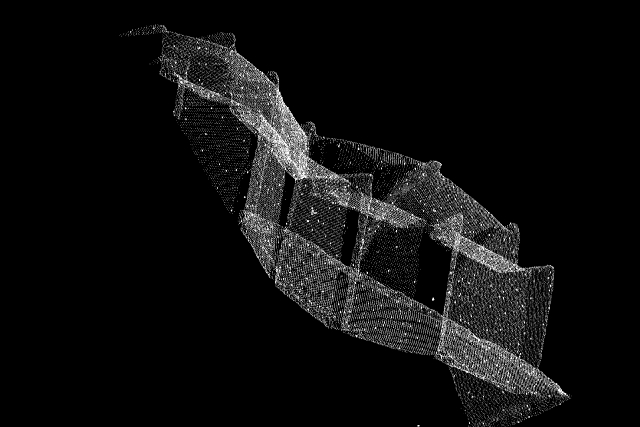
-) Bei der sogenannten Registrierung der Daten werden die verschiedenen Punktwolken auf einander abgestimmt. Im vorliegenden Fall liegen zwei verschieden orientierte Datensätze vor - jene 6 Punktwolken die bereits durch die Benutzung des Drehtellers eine Einheit bilden und die Punktwolke der Dachfläche. Nachdem einer der beiden Datensätze fixiert wurde, können beide Datensätze über die "3-Point-Registration" - durch die Wahl von drei Punkten die sowohl auf dem einen wie auch auf dem anderen Objekt zu sehen sind - zur Übereinstimmung gebracht werden.
-) Durch die "Global Registration" wird nun eine weitere Verfeinerung der Übereinstimmung vorgenommen.
-) Zusätzliche Bereinigung, d.h. Verbesserungen der vorliegenden Daten werden mit die Befehle "Reduce Noise" - bewirkt eine glattere Oberfläche - und den Befehl "Uniform Sample" - reduziert die Anzahl der Punkte durch die Definition eines Zwischenabstandes - erreicht.
-) Nachdem die Grundplatte nicht zum eigentlichen Objekt gehört, wird sie gelöscht.
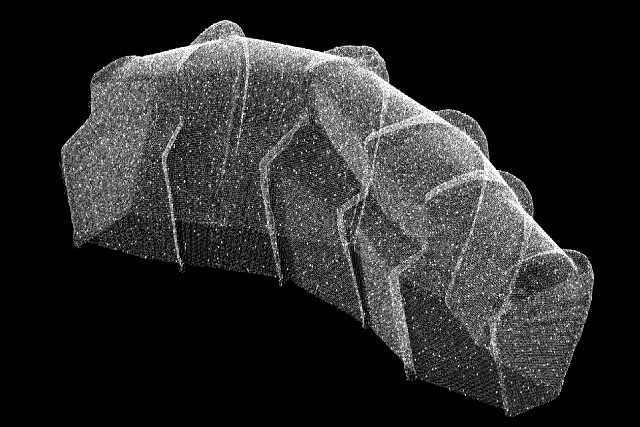
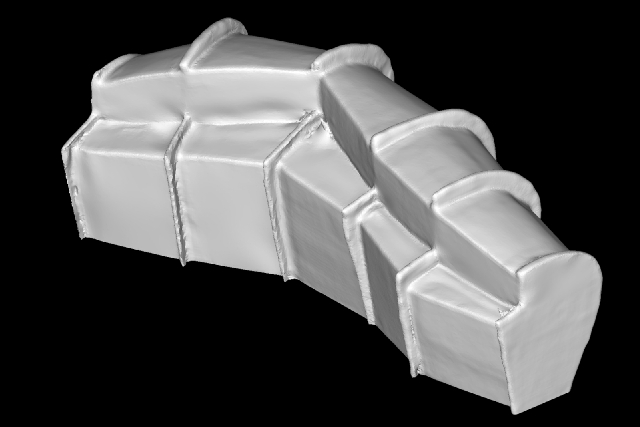
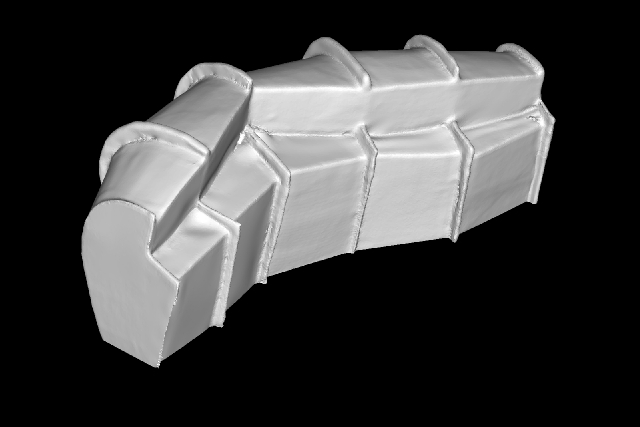
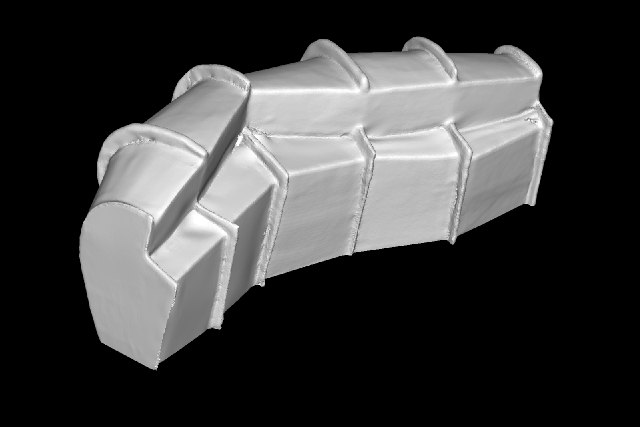
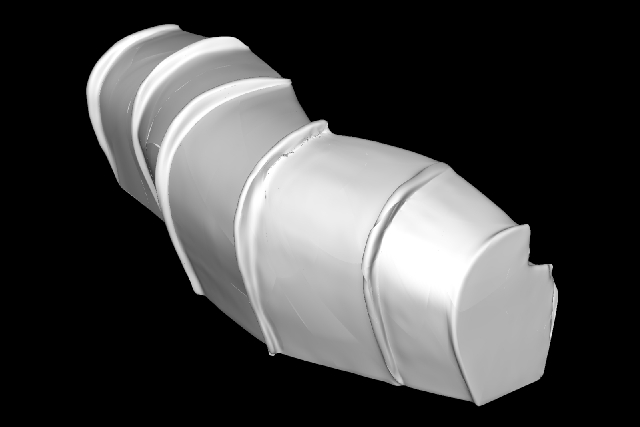
-) Der gereinigte Datensatz wird durch die Funktion "Wrap" in einen triangulierten Datensatz umgewandelt.
-) Regionale Unebenheiten in der Oberfläche - die bereits im Modell vorhanden waren - werden durch die Anpassung an die lokale Umgebung geglättet und der unebene untere Abschluss durch eine Ebene abgeschnitten.
-) Nun werden auch eventuell vorhandene Löcher im Datensatz geschlossen.
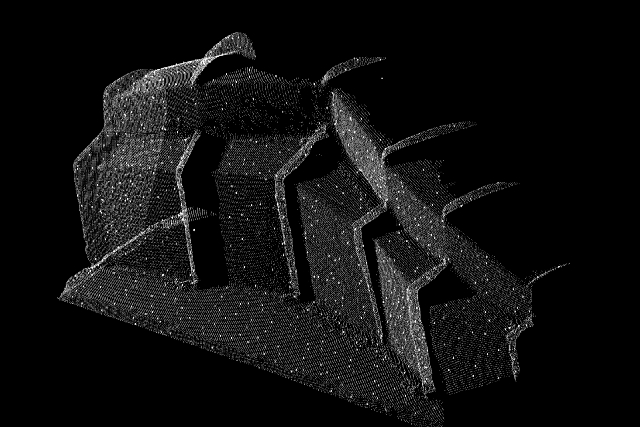
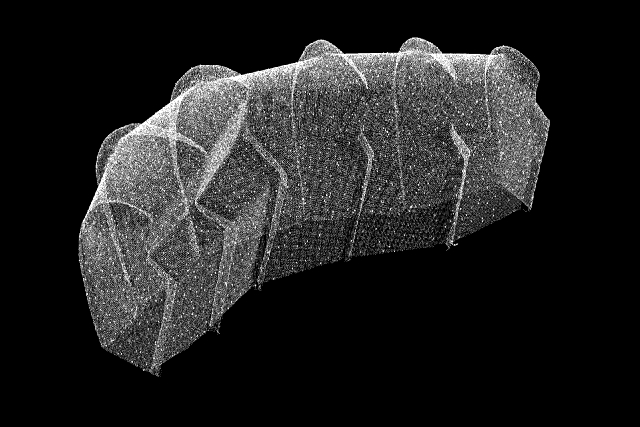
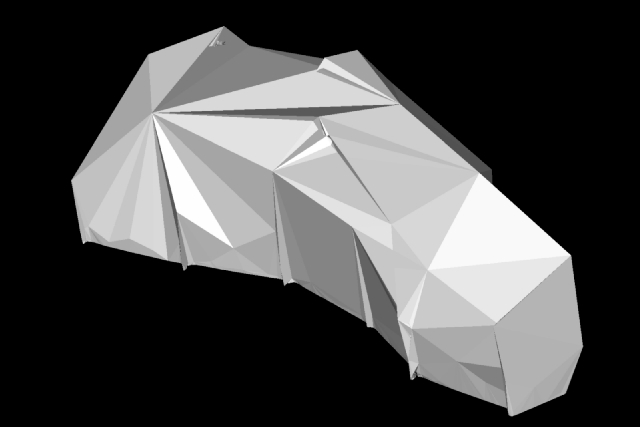
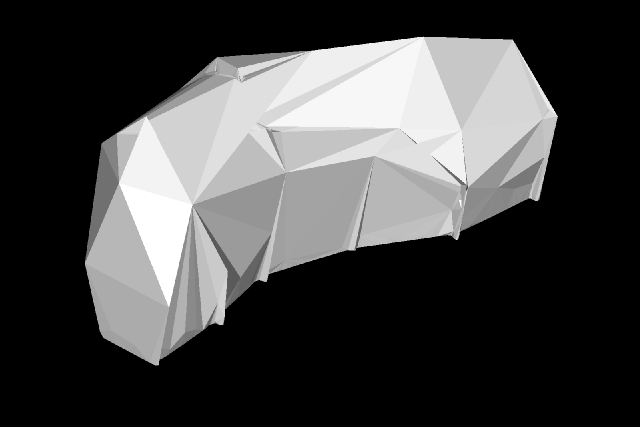
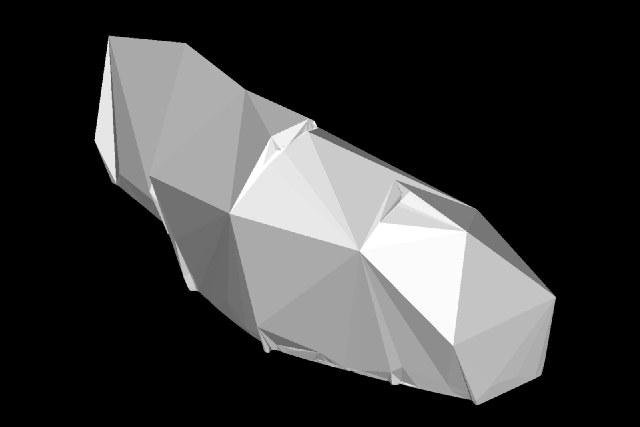
-) Die unterschiedliche Anzahl der Punkte zeigt ab wann der vorhandene Datensatz zu abstrakt wird.
4.a 100.000

4.b 10.000
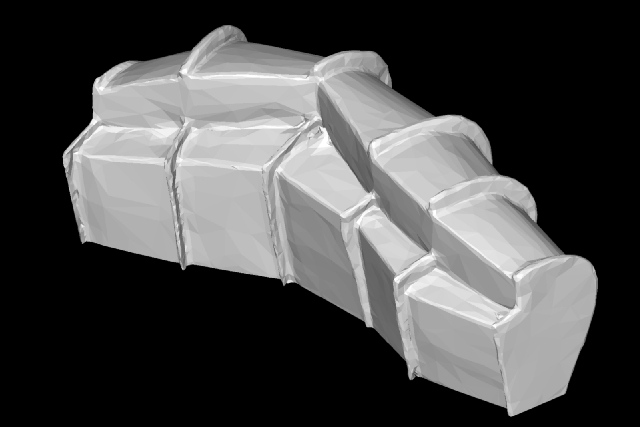
4.c 1.000
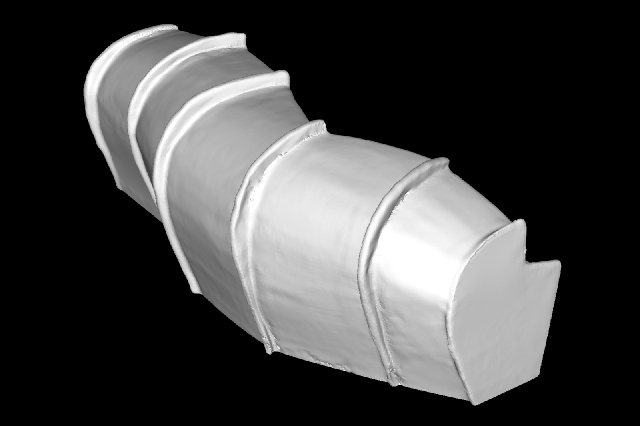
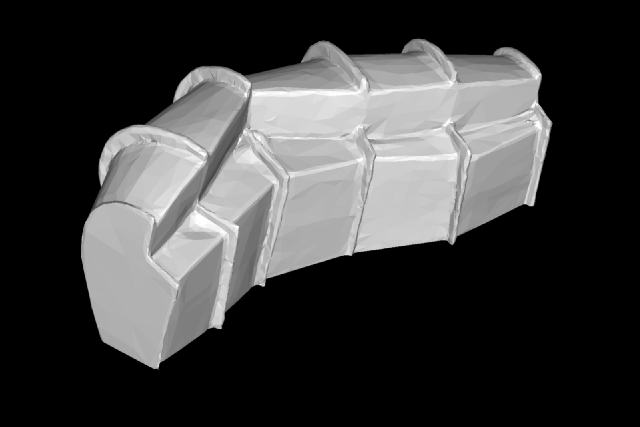
-) Aus dem vorliegende Datensatz wird nun eine "Nurbs" Oberfläche kreiert.
Dokumentation (Skalierung, Druckzeit: ssys_kurve cad/log.txt)
STL units: Millimeters;
STL scale: 0.5;
rotation about X: 90.0;
about Y: 0.0;
about Z: 0.0;
STL size: ~141.5/84.0/57.9mm
Estimated build time: 4 hr 16 min
Presentation: at the School of Environment and Society, Institute of Science Tokyo, Japan
This presentation explores process-driven approaches to healthcare design through early-stage functional planning and agent-based simulation. ...

Presentation: at the School of Environment and Society, Institute of Science Tokyo, Japan
This presentation explores how municipal data provided by the City of Vienna can be used to support urban analysis, planning, and decision-making. ...
Evolutionary algorithms enhanced with sAI in architectural design
Talk and Proceeding: eCAADe 2025 – Confluence (Ankara, Turkey | conference)
This research is concerned with the automation of the user interventional aspect within interactive genetic algorithms (IGA) as already explored in previous publications by the authors considering their use for Gestalt analyses and generative design optimization. ...
in: DAP / Re:Search_2020.2025
S. 244 - 257, Research Department for Digital Architecture and Planning, TU Wien (Publisher)
Interview with Wolfgang E. Lorenz on research, teaching, and practice, especially over the last 5 years
4th Digital Geographies Conference 2025
Artificial geographies: opening the black box for a new wave of critical thinking.
Predicting Material Composition of Walls and Floors using Machine Learning...
Proceedings of the ALGOPLANA Conference 2025
Research-driven education (“Forschungsgeleitete Lehre“) is common throughout TU Wien, be it in the form of seminars, labs or lectures. ...